Publications
2026
- AAMAS
 Manuscript under double-blind reviewSubmitted to International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2026
Manuscript under double-blind reviewSubmitted to International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2026 - ICRA
 Manuscript under double-blind reviewSubmitted to IEEE International Conference on Robotics and Automation (ICRA), 2026
Manuscript under double-blind reviewSubmitted to IEEE International Conference on Robotics and Automation (ICRA), 2026 - ACC
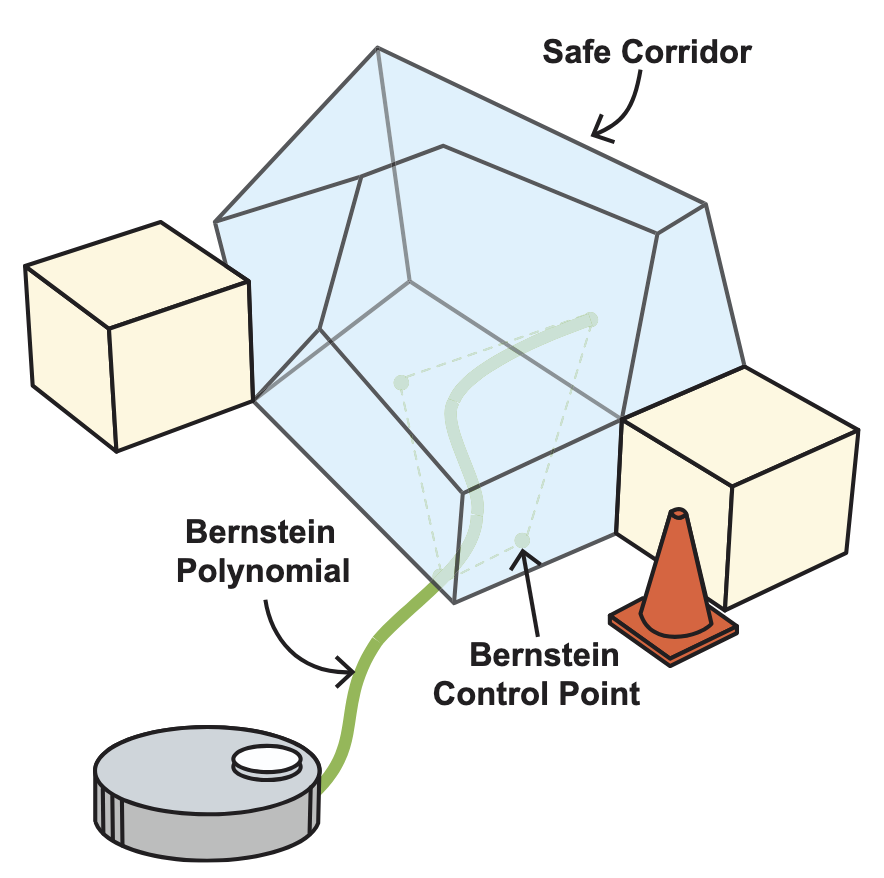 Safe Trajectory Planning with Bernstein Polynomials Under Control Barrier Function ConstraintsSubmitted to American Control Conference (ACC), 2026
Safe Trajectory Planning with Bernstein Polynomials Under Control Barrier Function ConstraintsSubmitted to American Control Conference (ACC), 2026